
درایو سری vx7 پرتوصنعت توان 200kw
﷼4.600.000.000
کنترل دور های سری VX7 با قابلیت کنترل دور موتور های آسنکرون و سنکرون با امکان نصب انکودر روی موتور ، کنترل سرعت و گشتاور بالایی دارند. این درایو ها با استفاده از میکروکنترلرهای پیشرفته DSP قابلیت تنظیم سرعت و کنترل موقعیت جهت درایو های CNC توسط انکودرهای متنوع و موتور های سنکرو را دارا می باشند.
توضیحات محصول
| عملکرد | مشخصات | |
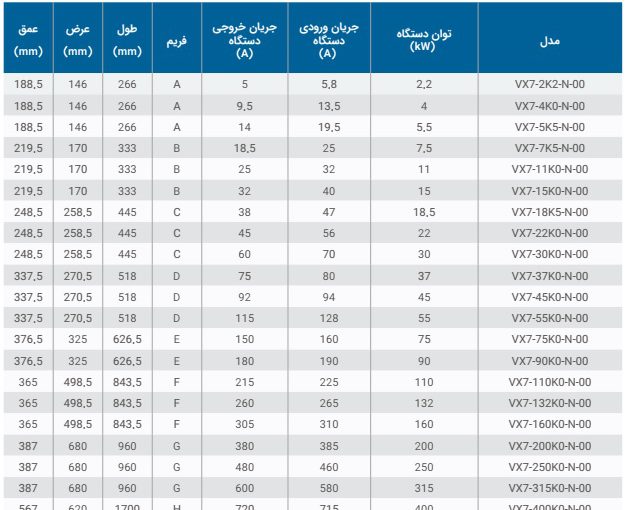
| ورودی اینورتر | توان دستگاه | 200kw |
| ولتاژ ورودی | سه فاز AC 3PH 400V ±10% | |
| جریان ورودی | مطابق با توان دستگاه | |
| فرکانس ورودی | دامنه مجاز 47~63Hz | |
| فیلتر EMC | نویز هدایتی و تششعی کلیه دستگاها مطابق با استاندارد
IEC61800-3 C3 میباشد در کلیه دستگاه ها جامپر حذف جریان EMC جهت سیستم تغذیه IT در محیط های دوم با امپدانس زمین بالا که جریان نشتی به زمین موجب تریپ در سیستم میگردد پیش بینی شده است استاندارد IEC61800-3 C2 در محیط های اول نیاز به فیلتر خارجی EMC میباشد. |
|
| فیلتر هارمونیکی | بالاتر از 400 کیلووات دارای چوک سه فازه خط میباشد | |
| خروجی اینورتر | ولتاژ خروجی | 0~400 Volt |
| فرکانس خروجی | 0~400Hz | |
| قابلیت اضافه بار
Heavy duty |
150٪ جریان نامی: 1 دقیقه در هر ده دقیقه
180٪ جریان نامی: 10 ثانیه 200٪ جریان نامی: 1 ثانیه |
|
| تنظیم فرکانس خروجی | ولوم دیجیتال ، ورودی آنالوگ ، تنظیم فرکانس پالس ، تنظیم سرعت حرکت چند مرحله ای، تنظیم PLC ساده ، تنظیم PID ، تنظیم ارتباطات MODBUS و پروفی باس و CANOPEN
تنظیم سرعت بصورت ترکیبی جمع ، تفریق، ماکزیمم و یا مینیمم تنظیم سرعت با شاسی های UP و یا Down و جمع با رفرنس های ترکیبی |
|
| واحد ترمز دینامیکی | یونیت ترمز تا توان 30kw ترمز بصورت داخلی وجود دارد ودر توان های بالاتر بصورت خارجی میتواند نصب شود | |
| تکنولوژی کنترل | مد کنترلی | SVPWM, SVC, VC (مد اسکالر و کنترل برداری حلقه بسته و حلقه باز) |
| نوع موتور | آسنکرون و سنکرون با هسته مغناطیس دائم (PMSM) و سروو های توان بالا (با انکودر های SIN/COS ) | |
| نسبت سرعت قابل تنظیم | موتور آسنکرون 1:200(SVC) و موتور سنکرون 1:20(SVC)
و در مد حلقه بسته 1:1000 (VC) |
|
| دقت سرعت قابل تنظیم | ±0.2%(SVC) و در مد حلقه بسته (VC) مقدار ±0.02% | |
| نوسان سرعت | +0.3%(SVC) | |
| پاسخ گشتاور | 20ms> در مد کنترل برداری و کنترل برداری حلقه بسته (VC) <10ms | |
| دقت گشتاور | 10% در مد کنترل برداری بدون سنسور سرعت | |
| گشتاور شروع | موتور آسنکرون 0.25Hz/150% (SVC)
وموتور سنکرون 2.5 Hz/150%(SVC) در مد حلقه بسته 0Hz/150%(VC) |
|
| فرکانس سوئیچینگ | 1.2~15kHz (پیش تنظیم کارخانه بر اساس توان کنترل دور میباشد) | |
| ارتباط شبکه | مدباس بصورت استاندارد بر روی کارت ورودی و خروجی اینورتر
کارت پروفی باس که مجهز به ورودی اترنت جهت مانیتورینگ میباشد. ( کارت آپشن) کارت CANOPEN بصورت آپشن |
|
| شتاب افزاینده و کاهنده | بصورت خطی و منحنی سهمی S شکل و انتخاب چهار شتاب توسط دو ورودی دیجیتال | |
| پانل کنترل | پانل اینورتر قابلیت جداشدن جهت نصب بر روی تابلو های فرمان | |
| حفاظت خطا | بیش از 30 عملکرد حفاظت از خطا را فراهم کنید: اضافه ولتاژ ، ولتاژ کم ، گرم شدن بیش از حد ،قطع فازورودی و قطع فاز خروجی، اتصال زمین، اتصال کوتاه خروجی، اضافه بار اینورتر، اضافه بار موتورو همچنین حفاظت کاهش ناگهانی بار( پاره شدن تسمه، خشک کارکردن پمپ،…) | |
| ورودی و خروجی های کنترلی | ورودی آنالوگ | دو کانال (AI1, AI2) 0~10V/0~20mA و یک کانال (AI3) -10V~+10V
تشخیص ولتاژی سیگنال آنالوگ ≤20mV |
| خروجی آنالوگ | دو کانال (AO1, AO2) 0~10V/0~20mA | |
| ورودی دیجیتال | هشت کانال ورودی با امپدانس داخلی 3.3kΩو یک کانال پالسی سرعت بالا تا ماکزیمم 50kHz
تشخیص پاسخ زمانی سرعت پالس ≤2ms |
|
| خروجی دیجیتال | یک کانال پالسی سرعت بالا و یک خروجی ترانزیستوری Open collector | |
| خروجی رله | دو خروجی رله قابل برنامه ریزی با مشخصات
3A/ AC250V, 1A/ 30VDC ترمینال مشترک ،بسته (NC) و باز (NO) رله 1 : RO1A NO, RO1B NC, RO1C رله 2 : RO2A NO, RO2B NC, RO2C |
|
| انکودر | دارای کارت انکودر پالسی استاندارد (تا 100kHz ) و کارت انکودر SIN/COS بصورت آپشن | |
| محیط نصب | روش قابل نصب | قابل نصب بر روی دیوار ، قابلیت نصب فلنج و در کیلو وات های بالا میتواند بصورت تابلو خود ایستا (Stand alone) باشد |
| دمای محیط نصب | -10°C ~ +50°C : توان نامی دستگاه بر اساس ماکزیمم 40°C طراحی گردیده است. دمای بالاتر از 40 درجه سانتیگراد تا 50 درجه سانتیگراد به ازای هر یک درجه اضافه دما سانتیگراد، 1.5% کاهش توان در نظر گرفته شود. | |
| حفاظت بدنه دستگاه | IP20 | |
| خنک کنندگی | بصورت هوای اجباری توسط فن | |
| توابع نرم افزاری دستگاه | تابع شناسایی دو موتور جدا
(موتور 1 و موتور 2) |
پس از وارد کردن پارامترهای پلاک موتور، توسط این تابع بصورت استاتیک و یا دینامیک پارامترهای الکتریکی موتور اندازه گیری و در اینورتر ثبت میگردد و جهت توابع محاسباتی کنترل برداری استفاده میگردد.
در درایو سری VX60 دو سری کامل از پارامترهای موتور پیش بینی شده و توسط سوئیچ دیجیتال قابل انتخاب میباشد |
| تابع توقف اسپیندل | چهار موقعیت نقطه صفر و هفت موقعیت مرجع | |
| رفرنس مرجع موقعیت | قابلیت تنظیم خارجی مرجع توسط سوئیچ ویا موقعیت پالس Z انکودر | |
| کنترل سروو | کنترل موقعیت شفت توسط شمارش پالس | |
| تابع پالس تقسیم شده | خروجی پالسی کنترل دور با توجه به مقسم تعریف شده | |
| تابع تنظیم کنترل شار در ناحیه تضعیف میدان | تنظیم گشتاور موتورهای سروآسنکرون در ناحیه تضعیف شار و جبران ساز اندوکتانس در فرکانس بالا | |
| تابع گشتاور اصطکاکی | ضرایب جبران سازی گشتاور در سرعت های پایین و بالا | |
| تابع AVR جهت کاهش مصرف انرژی | در کاربرد های که شرایط کم بار ایجاد میگردد میتواند با کاهش ولتاژ ، انرژی مصرفی از شبکه پایین آید همچنین در شبکه های با ولتاژ شبکه متغییر، ولتاژ را به طور اتوماتیک پایدار مینماید. | |
| انتخاب مد سرعت یا موقعیت ( position control ) | توسط ورودی دیجیتال | |
| تابع تعقیب سرعت | این تابع جهت بارهای در حال چرخش میباشد و اینورتر بر روی این نوع بارها ابتدا سرعت چرخش را تشخیص میدهد و سپس موتور را به سرعت درخواستی میرساند | |
| تابع اندازه گیری طول | این تابع بصورت شمارش پالسی میباشد | |
| تابع ترمز DC و مگنتایز | این تابع با قابلیت تنظیم زمانی ترمز DC در ابتدای استارت و یا استپ موتور میباشد. همچنین تابع مگنتایز هسته موتور قبل از شروع به حرکت موتور جهت گشتاور بالا در استارت میباشد. | |
| تابع انتگراتور | این تابع میتواند سرعت کنترل دور را با توجه به متغییر پروسه خط تنظیم نماید. ورودی فیدبک این انتگراتور میتواند بصورت آنالوگ، دیجیتال و یا شبکه مدباس باشد. و تابع استاپ انتگرال گیری و یا Pause نیز پیش بینی شده است | |
| توابع انتگراتور کنترل برداری | تنظیمات رگولاتورها و انتگراتور های الگوریتم کنترل برداری شامل حلقه سرعت و حلقه جریان | |
| تابع سرعت پله ای | توسط این تابع میتوانید توسط چهار ورودی دیجیتال، تعداد شانزده سرعت تنظیمی را انتخاب نمایید | |
| تابع PLC ساده | با این PLC میتوانید شانزده سرعت و چهار نوع شتاب را در زمان مشخص تکرار نمایید | |
| تابع پنجره فرکانسی | پنجره های فرکانسی امکان فعال کردن پروسه های جانبی را فراهم می آورند | |
| تابع شمارنده پالسی | این تابع جهت مقایسه شمارش تعداد پالس ورودی با دو مقدار تنظیمی دیجیتال ، خروجی دیجیتال صادر نماید | |
| تابع ورودیهای دیجیتال | پروگرام 40 نوع تابع عملکرد و فعال شدن سخت افزاری بصورت Active high و یا Active low و همچنین فعال شدن تابع بصورت نرم افزاری بصورت 1 و یا 0 امکان پذیر میباشد. علاوه بر موارد فوق قابلیت پروگرام تاخیر در وصل و یا درقطع ورودیها وجود دارد.
قابلیت فرمانهای روشن/خاموش و چپگرد/راستگرد Joystick |
|
| تابع خروجیهای دیجیتال | پروگرام 28 نوع تابع عملکرد و فعال شدن سخت افزاری بصورت Active high و یا Active low و همچنین قابلیت پروگرام تاخیر در وصل و یا درقطع خروجیها وجود دارد. | |
| تابع کنترل گشتاور | قابلیت تنظیم از ورودیهای آنالوگ و دیجیتال پالسی HDI و مدباس و پروفی باس
پارامترهای تنظیم حدبالای گشتاور موتوری و گشتاور ترمزی قابلیت کار درهردو مد گشتاور و مد کنترل سرعت در پروسه ها توسط ورودی دیجیتال |
|
| تابع کنترل ارتعاش موتور | این تابع در فرکانس های پایین و بالا مقادیر مختلف قابل تنظیم میباشد | |
| توابع تنظیم مد اسکالر یا SVPWM | قابلیت تنظیم پنج نوع منحنی V/f و گین جبران لغزش و تقویت گشتاور در فرکانس های پایین | |
| تابع تنظیم مستقل ولتاژ و فرکانس | قابلیت تنظیم مقدار ولتاژ و فرکانس خروجی اینورتر بصورت مسقل از ورودیهای آنالوگ و HDI و شبکه های ارتباطی درمد اسکالر | |
| تابع پرش فرکانس | تابع عبور از فرکانس های ارتعاش مکانیکی | |
| توابع مانیتورینگ | بیش از 40 نوع مقادیر قابل مشاهده از عملکرد درایو جهت ردیابی و اشکال یابی | |
| استانداردها | IEC61800-2 and IEC61800-5-1 included:
Voltage and torque and current rating Frequency and speed range Overcurrent/over Torque capability Power factor measurement Voltage division Checking of protective measures Properties under unusual service conditions Audible noise Steady state performance and temperature rise DC voltage test IEC 61000-4-2 immunity to electrostatic discharge IEC 61000-4-3 immunity to radiated electromagnetic fields IEC 61000-4-4 immunity to electrical fast transient/burst IEC 61000-4-5 immunity to surge IEC 61000-4-6 immunity to conducted disturbances induced by radio frequency fields IEC 61000-4-8 immunity to power frequency magnetic field |
|
اطلاات تکمیلی
| وزن | 126 کیلوگرم |
|---|---|
| ابعاد | 38 × 68 × 96 سانتیمتر |








نقد و بررسیها
هنوز بررسیای ثبت نشده است.